Morfologia Matemática em Análise de Imagens
2. Morfologia matemática binária
3. Morfologia matemática em tons de cinza
4. Morfologia matemática em cores
5. Granulometria
6. Referências bibliográficas
1. Introdução
A Morfologia Matemática é uma teoria para a análise de estruturas espaciais. Essa teoria chama-se de morfologia porque o seu objetivo é analisar a forma dos objetos e é matemática pelo fato que essa análise tem como fundamentação a teoria de conjuntos, a topologia, a álgebra dos reticulados, as funções randômicas. A Morfologia Matemática não é somente uma teoria mas principalmente uma poderosa ferramenta no processamento e análise de imagens. Está baseada principalmente na teoria de conjuntos.
Uma imagem digital está formada por uma quantidade finita de amostras de uma cena capturada pela lente de uma câmera. Uma imagem digital, ou imagem discreta é representada como subconjunto do plano cartesiano Z2, onde Z denota o conjunto dos números inteiros. Cada amostra da imagem, também conhecida como pixel, está localizada em uma posição (i,j) dentro da imagem, e tem associada alguma informação sobre a cor em essa posição.
Uma imagem binária é composta por dois tipos de pixels, os do plano de fundo e o plano principal, que são representados normalmente usando preto e branco, ou 0 e 1, respectivamente. A Figura 1 representa uma imagem binária de 11x11 pixels, onde o fundo é representado por pixels em cor branco e o objeto pelos pixels na cor preta.
Figura 1. Imagem binária.
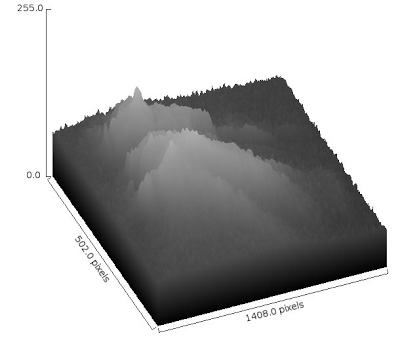
A intensidade dos pixels das imagens em tons de cinza são representados por valores discretos, e a quantidade de tons de cinza da imagem depende da forma de representação usada, sendo a representação em 8 bits a mais usada que permite representar 256 tons de cinza, como a imagem da Figura 2a. Uma imagem em tons de cinza pode ser vista como um mapa de alturas, onde a posição (x,y) do pixel é uma posição topográfica no mapa e a intensidade do pixel é considera como a altura do relieve na pocisão (x,y), como mostrado na Figura 2b.

a)
b)
Figura 2. Exemplo de a) imagem em tons de cinza e b) um mapa de alturas de uma imagem em tons de cinza.
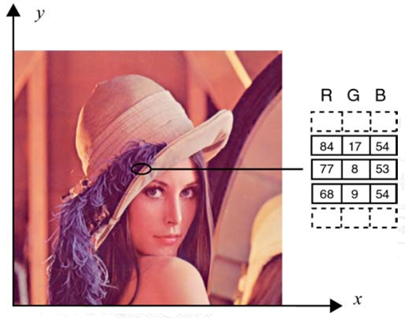
Uma imagem digital em cores é uma função bidimensional com valor tridimensional f: Z2→ Z3, onde cada pixel X=(x , y) está representado por um vetor de componentes P(I1 , I2 , I3). O valor de cada um dos componentes depende do espaço de cor (RGB, HSI, CIELAB, YIQ, etc.) com que esteja representada a imagem.
b)